公開日:2025/04/24
近年、ディープラーニングによる人工知能(AI)は、様々な場所で使用され、応用範囲はさらに拡大しています。
当社はAIに対応した組込みCPUボード「AP-RZV2-0A」をリリースいたしました。「AP-RZV2-0A」は、ルネサス エレクトロニクス社のAI MPU「RZ/V2H」を搭載し、最大80TOPSのAI性能と世界最高クラスの電力効率を実現しています。
今回の技術コラムでは、「RZ/V2H」の概要と実際の動作例をご紹介いたします。
1. 概要
1)「RZ/V2H」の概要
「RZ/V2H」は、Arm Cortex-A55 Quad + Cortex-R8 Dual + Cortex-M33 の合計7個のプロセッサと、DRP-AI3 + DRPの2個のAIアクセラレータを内蔵しています。また、カメラ入力にMIPI CSI-2 x 4チャネル、ディスプレイ出力にMIPI DSIのほか、USB3.2、PCI Expressなど、最新の周辺インタフェースも備えています。
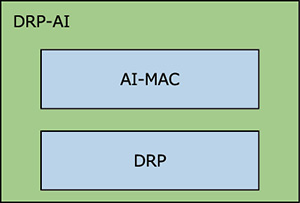
DRP-AIはAI-MAC(積和演算器)とDRP(動的再構成プロセッサ)で構成され、畳込み層や全結合層の演算をAI-MAC、その他の前処理などをDRPに割り当てることにより、AI処理の高速化を実現しています。
DRP-AIの特長を以下に記載します。
- AI 推論専用ハードウエアアクセラレータ
- AIモデル変換ツール(DRP-AI Translator)の提供
- DRP-AI と DRP-AI Translatorの協調による高い電力効率
- AIに必要な前後処理をDRPで高速処理
DRPに関しては、技術コラム Vol.8「RZ/A2Mで画像処理を劇的に高速化!」でも解説しておりますのでご覧ください。
2)「AP-RZV2-0A」の概要
「AP-RZV2-0A」は、高度なAIを必要とする自律型システムやFA向けマシンビジョンなど、ビジョンAI応用機器での利用を想定し、「RZ/V2H」の機能を最大限活かせるように設計されています。
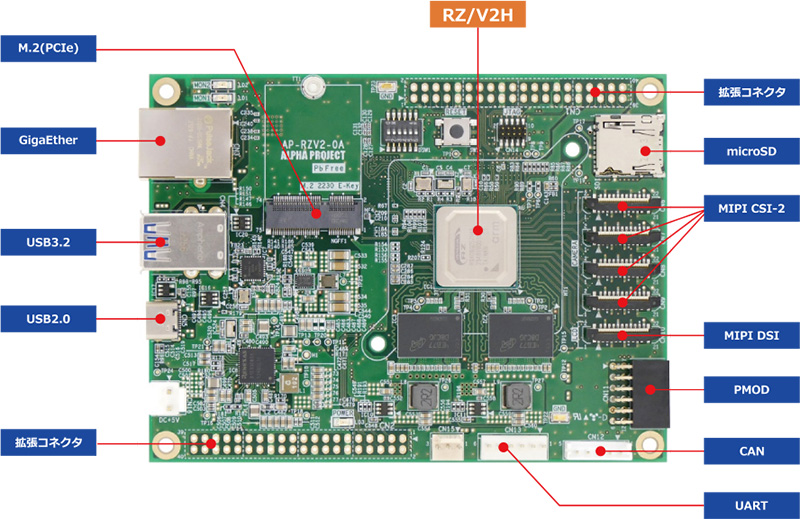
| CPU | R9A09G057H48GBG (1368pin FCBGA) Arm Cortex-A55 Quad Arm Cortex-R8 Dual Arm Cortex-M33 AI Accelerator DRP-AI3 + DRP |
|---|---|
| ROM |
|
| RAM |
|
| I/F |
|
| 寸法 | 120 × 90mm |
2. 開発環境
1)「RZ/V2H」の開発環境
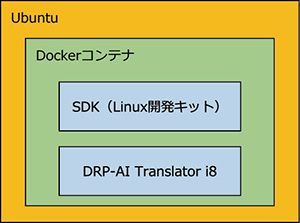
「RZ/V2H」の開発は、ルネサス エレクトロニクス社にて提供されております「RZ/V AI SDK」を使用します。
開発環境は以下のようにDocker上に作成します。
では、早速開発環境の構築手順を説明します。
はじめに、開発に使用するDockerをUbuntuにインストールします。
$sudo snap install docker
次に、必要なファイルを作成/ダウンロードします。
- Dockerfileをダウンロード
https://raw.githubusercontent.com/renesas-rz/rzv_drp-ai_tvm/main/DockerfileV2H - DRP-AI Translator i8インストーラをダウンロード
https://www.renesas.com/ja/software-tool/drp-ai-translator-i8 - Linux開発キットでSDKを作成
AP-RZV2-0A用のLinux開発キット「LK-RZV2-A01」のBSPを使用して作成します。
準備したファイルをUbuntu内に以下の構成で準備します。
ここでは、作業ディレクトリとして「~/ai_sdk_work」としています。
~/ai_sdk_work
|-- DockerfileV2H
|-- DRP-AI_Translator_i8-v1.03-Linux-x86_64-Install
`-- poky-glibc-x86_64-core-image-weston-aarch64-rzv2h-aprzv20a-toolchain-3.1.31.sh
上記の準備が終わりましたら、Dockerイメージを作成します。
$cd ~/ai_sdk_work
$docker build -t drp-ai_tvm_v2h_image_${USER} -f DockerfileV2H .
3. ビルドから実行
開発環境の構築後、デモアプリケーションのビルドから実行までを行います。
ビルドはDocker上で行いますので、事前にDockerを起動してください。
1) デモプログラムの入手
GitHubリポジトリよりデモアプリケーションを取得します。
(Docker)#cd $TVM_ROOT
(Docker)#git clone https://github.com/Ignitarium-Renesas/rzv_ai_apps.git
/drp-ai_tvm/rzv_ai_apps/
|-- 01_Head_count
|-- 02_Line_crossing_object_counting
|-- 03_Elderly_fall_detection
|-- 04_Safety_helmet_vest_detection
|-- 05_Age_gender_detection
|-- 07_Animal_detection
|-- 09_Human_gaze_detection
|-- 10_Driver_monitoring_system
|-- 11_Head_count_topview
|-- 12_Hand_gesture_recognition_v2
|-- 13_Car_ahead_departure_detection
|-- 14_Multi_camera_vehicle_detection
|-- 15_Road_lane_segmentation
|-- LICENSE
`-- README.md
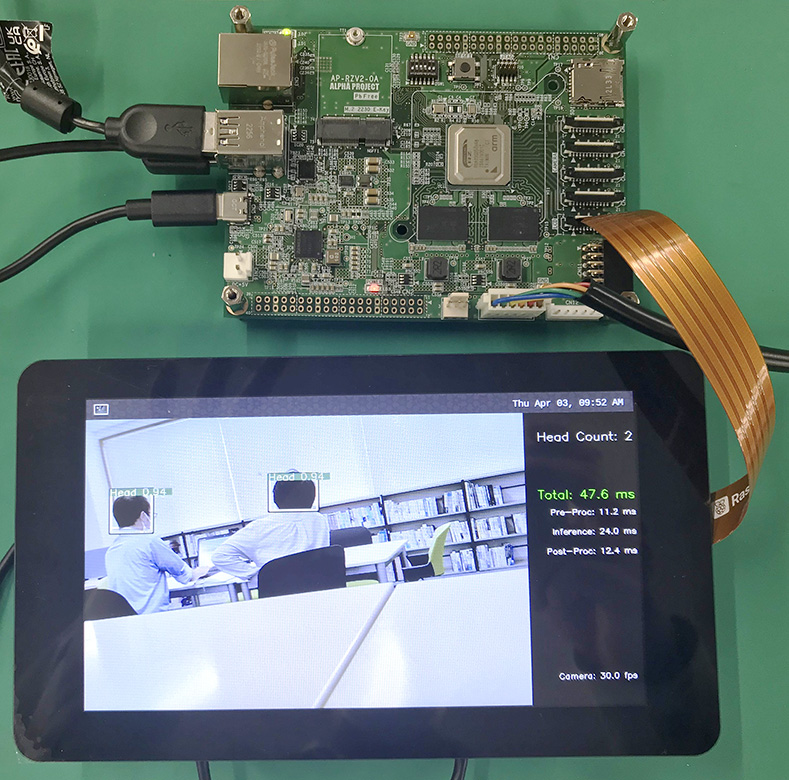
デモアプリケーションは複数ありますが、以降では「01_Head_count」にて説明します。
また、表示解像度は1920×1080で構成されていますので、必要に応じて適宜変更します。
2) プログラムのビルド
プログラムのビルド手順を以下に記載します。
作業ディレクトリを作成します。
(Docker)#mkdir -p $TVM_ROOT/rzv_ai_apps/01_Head_count/src/build
Makefileを作成して、ビルドします。
(Docker)#cd $TVM_ROOT/rzv_ai_apps/01_Head_count/src/build
(Docker)#cmake -DCMAKE_TOOLCHAIN_FILE=./toolchain/runtime.cmake -DV2H=ON ..
(Docker)#make -j$(nproc)
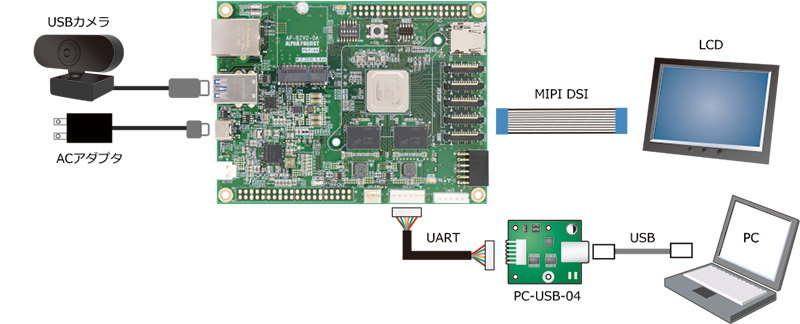
3) 接続
4) 実行
上記の環境が用意できましたら、下記の手順で動かしてみます。
① Linuxの起動
AP-RZV2-0Aの電源を入れてLinuxを起動し、rootユーザーにてログインします。
② ビルドして生成したファイルを以下のように配置します。
~/tvm_demo/
|-- libtvm_runtime.so
|-- head_count_yolov3
| |-- deploy.json
| |-- deploy.params
| `-- deploy.so
|-- labels.txt
`-- head_count_app
https://github.com/Ignitarium-Renesas/rzv_ai_apps/releases/download/v5.00/ 01_Head_count_deploy_tvm-v230.so
③ ライブラリのパスを設定して実行します。
#cd ~/tvm_demo
#export LD_LIBRARY_PATH=./
#./head_count_app USB
4. まとめ
今回は、「RZ/V2H」の概要とDRP-AIの動作デモをご紹介いたしました。
説明に使用した動作デモはDRP-AIとしては一例となりますが、学習済データ等を変更することで様々な用途に使用できます。
また、ご紹介した内容はLinux開発キットに付属するアプリケーションノートにて、より詳しい手順にて説明しております。ご興味がございましたらぜひ当社のAP-RZV2-0Aをお求めいただき、DRP-AIを体験してみてください。
製品のご案内
本コラム以外にも開発にお役立ていただける技術情報をアプリケーションノートとして公開しております。
ご興味のある方は、ぜひ製品をご利用ください。

- ※記載されている会社名、製品名は、各社の商標または登録商標です。
- ※記載の内容は改良のため、予告なく変更する場合がございます。